
Gerelateerde Handleidingen voor OTTO MOTORS 100 V2.5



Samenvatting van Inhoud voor OTTO MOTORS 100 V2.5
- Pagina 1 GEBRUIKS- EN ONDERHOUDSHANDLEIDING OTTO 100 V2.5 OTTO 100 V2.5 Documentcode: OMM-000081 Revisie: F Originele instructies in het Engels.
-
Pagina 2: Contactgegevens
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F CONTACTGEGEVENS OTTO Motors zet zich in voor uw succes en tevredenheid. We zijn gevestigd in Kitchener, Ontario. Als u vragen of opmerkingen hebt, kunt u onze ondersteunende kennisbank bezoeken voor meer informatie of contact met ons ondersteuningsteam opnemen. -
Pagina 3: Inhoudsopgave
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 9 Overzicht van onderdelen 33 INHOUDSOPGAVE 9.1 Liftapparaat 33 Contactgegevens 2 9.2 Knoppen en poorten 34 Inhoudsopgave 3 9.3 Indicatoren van voertuigstatus 37 Lijst met afbeeldingen 5 9.4 Perceptiesensoren 40... - Pagina 4 13.1 Lock-out/tag-out procedure 66 13.2 Opstarten 68 13.3 Uitschakelen 68 13.4 Opladen 69 13.5 Een niet-aangedreven of uitgeschakelde OTTO 100 V2.5 verplaatsen 70 13.6 Verplaatsen en uitpakken 71 13.7 Opslag 72 13.8 Langdurige opslag 72 13.9 De OTTO-app 72 13.10 Verbinding maken met de OTTO 100 V2.5 ZRV 73...
-
Pagina 5: Lijst Met Afbeeldingen
Referentie voor externe Abbildung OTTO 100 V2.5 ZRV Naambord noodstopbedrading Afbeelding Beknellings-/verbrijzelingszones Afbeelding Handleiding voor contactdosering terwijl de OTTO 100 V2.5 ZRV koppelt aan het (3-IDEC Corp., 2009) laadstation Afbeelding Kratschroeven Afbeelding Gevarenzone van de laadcontacten Afbeelding Houten vulstukken in krat... -
Pagina 6: Lijst Met Tabellen
(isometrisch zij-, boven- en achteraanzicht) Tabel Overzicht van onderhouds- en inspectieschema voor OTTO 100 V2.5 ZRV Tabel Probleemoplossende acties © Clearpath Robotics Inc. 2019. Alle rechten voorbehouden. CLEARPATH en OTTO zijn handelsmerken van Clearpath Robotics Inc. Alle andere product- en bedrijfsnamen zijn handelsmerken of handelsnamen van hun respectieve bedrijven. -
Pagina 7: Belangrijke Veiligheidsinformatie
Het niet opvolgen van deze instructies kan leiden tot LETSEL of SCHADE aan het systeem en/of eigendommen. De veiligheid van gebruikers is de hoogste prioriteit voor OTTO Motors. OTTO Motors produceert krachtige en snelbewegende machines die mogelijk ernstig letsel kunnen veroorzaken, waaronder overlijden, als deze onjuist worden gebruikt of onderhouden. -
Pagina 8: Revisiegeschiedenis
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F REVISIEGESCHIEDENIS Tabel 1 Revisiegeschiedenis REVISIE DATUM WIJZIGINGEN december 2019 Eerste publicatie januari 2020 Herzien om de leveranciersverklaring van FCC-conformiteit op te nemen april 2020 Herzien om informatie op te nemen voor de OTTO 100... -
Pagina 9: Gevaren En Bewustzijn
GEVAREN EN BEWUSTZIJN 2.1 Algemene gevarenlabels Bestudeer het volgende voor meer informatie over de labels die kunnen worden gebruikt op OTTO Motors- producten. Gevaren kunnen ook van toepassing zijn op hulpstukken en accessoires die worden gebruikt in combinatie met een OTTO Motors-product. -
Pagina 10: Veiligheidsbewustzijn
2.2 Veiligheidsbewustzijn Personeel dat aanwezig is in een faciliteit van OTTO Motors moet op de hoogte worden gebracht van of worden vergezeld door personeel dat vertrouwd is met de specifieke risico's en gevaren van zelfrijdende voertuigen (ZRV's). De volgende checklist identificeert basisonderwerpen die moeten worden behandeld door locatiespecifieke training voor de veiligheidsoriëntatie van werknemers en bezoekers. - Pagina 11 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Het oversteken in het pad van een bewegende OTTO-ZRV moet worden vermeden, evenals het plaatsen of gooien van obstakels in het pad van een bewegende OTTO-ZRV. Wees u ervan bewust dat een OTTO-ZRV zich op elk moment overal in het werkgebied van het gebouw kan bevinden en voor struikelgevaar kan zorgen, zelfs als deze niet in beweging is.
-
Pagina 12: Omstandigheden In De Faciliteit
Onderhoud dat niet is uiteengezet in de gebruiks- en onderhoudshandleiding mag alleen worden uitgevoerd door geautoriseerd personeel van OTTO Motors. 2.3 Omstandigheden in de faciliteit OTTO-ZRV's, -hulpstukken en -accessoires zijn ontworpen om te werken op vlakke en schone oppervlakken. -
Pagina 13: Maximaal Laadvermogen
Let op Als een OTTO Motors-product wordt beladen met meer gewicht dan aangegeven door het hulpstuk, accessoire of basis OTTO-ZRV (zonder hulpstuk), belemmert dit de OTTO-ZRV in het correct bepalen van de remafstanden en dit kan ook het voertuig, hulpstuk of accessoire beschadigen. -
Pagina 14: Hanteren Van De Accu
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 2.5 Hanteren van de accu Zoals bij de meeste toepassingen die accu's met lithiumtechnologie gebruiken, moeten er speciale voorzorgsmaatregelen worden genomen om dit soort materiaal te hanteren. -
Pagina 15: Disclaimer
OTTO Motors aanvaardt geen verantwoordelijkheid voor eventuele fouten of omissies die mogelijk aanwezig zijn in dit document. OTTO Motors is in geen enkel geval aansprakelijk voor kosten of schade die voortvloeien uit het gebruik van dit document of de hierin beschreven hardware en software. - Pagina 16 OTTO Motors, kan/kunnen de veiligheid van het product in gevaar brengen. Als u op enig moment vragen of zorgen over de veilige werking van uw OTTO Motors-product hebt, neemt u contact op met de klantenondersteuning van OTTO Motors.
-
Pagina 17: Beoogd Gebruik
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F BEOOGD GEBRUIK Zelfrijdende voertuigen (ZRV's) van OTTO zijn autonome mobiele robots bedoeld voor gebruik in industriële faciliteiten. ZRV's van OTTO zijn bedoeld om materialen binnenshuis in industriële gebouwen te vervoeren, gebruikmakend van visuele mapping en locatie, en intelligente navigatie om hun beweging te plannen. -
Pagina 18: Inleiding
-softwareversie 2.16. Wijzigingen door gebruikers van de OTTO 100 V2.5 ZRV die de prestaties of veiligheid van het voertuig beïnvloeden, zijn niet toegestaan. Dit omvat, maar is niet beperkt tot, wijzigingen die van invloed zijn op de fysieke grootte, de massa of de vloertractie van het voertuig. Er mogen geen wijzigingen worden aangebracht die van invloed zijn op de geïntegreerde sensoren of de interne elektronica. - Pagina 19 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Abbildung 3 OTTO 100 V2.5 ZRV Naambord © Clearpath Robotics Inc. 2020. Alle rechten voorbehouden. CLEARPATH en OTTO zijn handelsmerken van Clearpath Robotics Inc. Alle andere product- en bedrijfsnamen zijn handelsmerken of handelsnamen van hun respectieve bedrijven.
-
Pagina 20: Toepasselijke Documenten
Gebruiks- en onderhoudshandleiding verzamelwagen OMM-000074 Standaardnavigatiespecificatie voor de OTTO 100 V2.5 SC-000056 Elektrische tekening op hoog niveau voor de OTTO 100 V2.5 SYS-000042 Enscenering Verzamelwagen ICD-000073 © Clearpath Robotics Inc. 2020. Alle rechten voorbehouden. CLEARPATH en OTTO zijn handelsmerken van Clearpath Robotics Inc. Alle andere product- en bedrijfsnamen zijn handelsmerken of handelsnamen van hun respectieve bedrijven. -
Pagina 21: Productveiligheid
De beste manier om de bescherming van mensenlevens en apparatuur te waarborgen rond de OTTO 100 V2.5 ZRV, is een veilige afstand te handhaven en aandacht te schenken aan de lichtbuis en geluidswaarschuwingen om te anticiperen op de intenties van het voertuig. Als er werkzaamheden worden uitgevoerd op het laadsysteem, volgt u de plaatselijke lock-out/tag-outprocedures voor veiligheid. -
Pagina 22: Gevaren
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 6.3 Gevaren De OTTO 100 V2.5 ZRV heeft zelfs tijdens de normale werking een aantal risico's voor gebruikers. Alle gebruikers moeten zich vertrouwd maken met de potentiële gevaren van het systeem, zodat ze deze kunnen anticiperen en vermijden. - Pagina 23 Bij schade of brand aan de accu belt u de plaatselijke nooddiensten en verlaat u het gebied onmiddellijk. Beknelling/verbrijzeling Voorwerpen kunnen bekneld raken tussen de OTTO 100 V2.5 ZRV en de OTTO 100 Fast Charger V2.5 en wagens. Houd uw handen en andere voorwerpen altijd uit de buurt van deze beknellingspunten. Blijf uit de buurt van alle dockende OTTO-ZRV's.
- Pagina 24 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F CONTACTPATROON SIGNAALCONTACT LAADCONTACTEN Afbeelding 5 Gevarenzone van de laadcontacten Afbeelding 6 Gevarenzone voor laadcontacten van voertuig Beknelling/verbrijzeling Voorwerpen kunnen bekneld raken door de hefplaat. Pak of plaats nooit een voorwerp in de buurt van de hefplaat of in de buurt van de signaal- of laadcontacten, omdat dit kan leiden tot beknelling of verbrijzeling.
- Pagina 25 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Vallende voorwerpen Voorwerpen kunnen uit een geladen OTTO 100 V2.5 ZRV of wagen vallen. Volg ICD-000079 voor het laden van voorwerpen op de OTTO 100 V2.5 ZRV of wagen. Overschrijd nooit de vermelde beperkingen. Verpletteren/botsing Zoals hieronder weergegeven (zie ICD-000078 voor een gedetailleerde weergave), ligt het obstakeldetectievlak van de OTTO 100 V2.5 ZRV boven de hoogte van een menselijke voet.
-
Pagina 26: Veiligheidsafstand
Raadpleeg het ISO 3691-4 bijlage A en navigatiespecificatiedocument (SC-000056 of het specifieke document voor uw faciliteit dat u door OTTO Motors of een geautoriseerde partner is verstrekt) dat u hebt ontvangen voor uw specifieke OTTO 100 V2.5 ZRV-installatie voor verwijzingen naar de voor mensen uitgesloten zone tijdens het opladen, en andere afstanden die nodig zijn voor het gebruik. - Pagina 27 OTTO-ZRV - zie hierboven), wordt de snelheid van het buitenste uiteinde van de OTTO-ZRV en zijn lading door de OTTO Motors-hardware en -software beperkt tot minder dan 0,3 m/s om het gevaar voldoende te verminderen. Daarnaast worden er drie aanvullende methoden gebruikt om het risico nog verder te verminderen: •...
- Pagina 28 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F aan te verminderen. • De OTTO-ZRV maakt gebruik van visuele en akoestische waarschuwingen om gebruikers op de hoogte te brengen van de intentie van de OTTO-ZRV om achteruit te rijden. Deze maatregelen zorgen ervoor dat het personeel in het gebied wordt gewaarschuwd voor de beweging van de OTTO-ZRV.
-
Pagina 29: In Geval Van Een Botsing
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F IN GEVAL VAN EEN BOTSING 1. Stop de OTTO 100 V2.5 ZRV door op de rode Noodstopknop te drukken aan de achterkant van het OTTO 100 V2.5 zelfrijdende voertuig (ZRV). -
Pagina 30: Systeemoverzicht
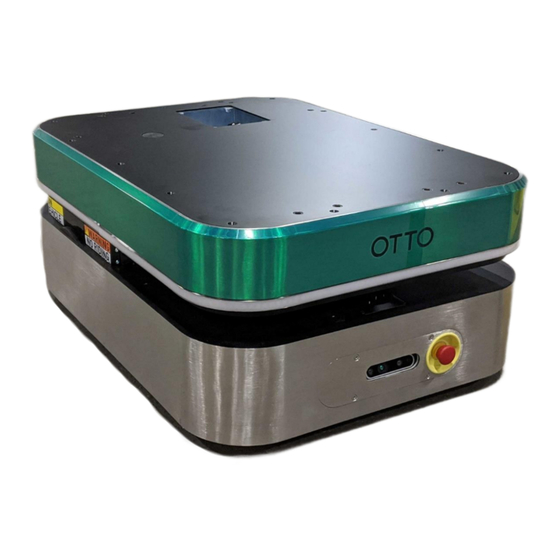
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F SYSTEEMOVERZICHT Dit gedeelte geeft een overzicht van de belangrijke elementen van het OTTO 100 V2.5 zelfrijdende voertuigsysteem (ZRV). - Pagina 31 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Accu en voedingssysteem Looptijd van accu ~ 6 uur voor een typisch gebruiksscenario OTTO-ZRV's zijn ontworpen voor het opladen bij gelegenheid en beheren hun eigen opladen op intelligente wijze tussen werkzaamheden door.
- Pagina 32 Werkomgeving Binnenshuis Temperatuurbereik in 20 °C - 40 °C (68°F to 104°F) bedrijf Neem contact op met OTTO Motors als er lagere bedrijfstemperaturen nodig zijn. Relatieve 0 - 85% niet-condenserend luchtvochtigheid Maximale operationele 2000 m (NHN)
-
Pagina 33: Overzicht Van Onderdelen
9.1 Liftapparaat De OTTO 100 V2.5 ZRV is uitgerust met een interne liftfunctie die tot 150 kg kan optillen. Zoals hieronder te zien is, kan de bovenste helft van het voertuig boven de LiDAR-holte worden opgeheven om een lading op te pakken of om de laadcontacten bloot te leggen. -
Pagina 34: Knoppen En Poorten
Noodstopknop 9.2.1 Aan de achterkant van de OTTO 100 V2.5 ZRV bevindt zich een noodstopknop (zie hierboven), en deze is zodanig geplaatst dat er in geval van nood gemakkelijk tegenaan kan worden geschopt. Zodra de knop ingedrukt is, kan het voertuig niet langer bewegen en blijft dit in deze toestand totdat de noodknop wordt uitgetrokken en de veiligheidsresetknop wordt ingedrukt. -
Pagina 35: Aan-Uitknop
De aan-uitknop bevindt zich naast de ethernetaansluiting (zie hierboven) en wordt door een gebruiker gebruikt om de OTTO 100 V2.5 ZRV uit een onbekende toestand te halen. Als u deze knop kort ingedrukt houdt, wordt de OTTO 100 V2.5 ZRV opgestart of uitgeschakeld. Deze schakelaar kan gedurende 10 seconden worden ingedrukt om alle elektronica binnen de OTTO 100 V2.5 ZRV te resetten. -
Pagina 36: Poort Voor Handbediende Oplader
9.2.4 De poort voor de handbediende oplader, naast de veiligheidsresetknop (zie hierboven), wordt gebruikt in combinatie met een handbediende oplader om de OTTO 100 V2.5 ZRV op te laden wanneer het voertuig geen OTTO 100 Fast Charger acculader kan gebruiken. -
Pagina 37: Indicatoren Van Voertuigstatus
(het lichtpatroon) te veranderen om de status of beweging van een voertuig aan te geven. In combinatie met geluidsindicaties maken voertuigen het altijd duidelijk welk gedrag u kunt verwachten. Tabel 5 OTTO 100 V2.5 ZRV-lichtbuispatronen en aangegeven status NAAM BESCHRIJVING... -
Pagina 38: Handmatige Bediening
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Opladen De OTTO-ZRV wordt opgeladen in een laadstation. v2.16 en later Achterste hoeken rood Groen langzaam uitbreidend met aanduiding van het laadniveau in stappen van 20% Voorste hoeken wit... - Pagina 39 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Werkend op zijn De beweging van de OTTO-ZRV is plaats vergrendeld terwijl deze wacht op Volledig groen verdere invoer van een gebruiker of hulpstuk.
-
Pagina 40: Perceptiesensoren
De LiDAR wordt rechtstreeks aangesloten op het aandrijfsysteem om botsingen te helpen voorkomen. Hierdoor wordt de OTTO 100 V2.5 ZRV verhinderd om te bewegen als er een obstakel is in het LiDAR-veld. -
Pagina 41: Optische Sensoren Aan De Achterkant
Een optische arraysensor detecteert tijdens het achteruitrijden obstakels aan de achterkant van de OTTO 100 V2.5 ZRV. Deze sensoren zijn hulpsensoren en vormen geen onderdeel van het veiligheidssysteem. De OTTO 100 V2.5 ZRV is daarom beperkt tot een achteruitrijsnelheid van minder dan 0,3 m/s om het risico op letsel te verminderen. -
Pagina 42: Stroomonderbrekers En Lock-Out/Tag-Out
De lock-out/tag-outpen is niet zichtbaar wanneer de stroomonderbreker gesloten is. 9.6 OTTO 100 Fast Charger OTTO 100 V2.5 ZRV's kunnen volledig zelfstandig opladen bij OTTO 100 Fast Charger -oplaadstations. Zie hieronder voor een afbeelding van de grote sleutelgatvormige navigatievoetafdruk die vrij moet zijn van obstakels voor het autonome opladen. -
Pagina 43: Verzamelwagen
TOREN NAVIGATIEVOETAFDRUK LINKERLAADTOREN LAADSTATION Afbeelding 14 Componenten van OTTO 100 V2.5 ZRV- en OTTO 100 Fast Charger-componenten (Ecotec-oplader en oplaadstation) 9.7 Verzamelwagen Er kunnen verzamelwagens zijn inbegrepen bij uw installatie. De verzamelwagen is ontworpen om ladingen van niet meer dan 130 kg te vervoeren, en voorwerpen die op de wagen worden geplaatst, moeten voldoen aan de stabiliteitsvereisten. -
Pagina 44: Interface Voor Hulpstukken
Zie voor meer informatie ICD-000079 - Interface voor lading op OTTO 100 V2.5 ZRV. Deze documenten zijn beschikbaar op het ondersteuningscentrum van OTTO Motors op help.ottomotors.com. Voor veilig laden... -
Pagina 45: Aansluitingen In Interface Voor Hulpstukken
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 10.2 Aansluitingen in interface voor hulpstukken De volgende circuits zijn aanwezig op het toegangspaneel van de laadconnector: • 1 x Power over Ethernet (Poe+) RJ45-scheidingsconnector •... - Pagina 46 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F CPC-connector 10.2.3 De verbindingsconnector voor de CPC-connector met 37 posities is TE-connectiviteit, CPC-plugassemblage maat 23-37, onderdeelnr. 206305-1. Toegang tot documentatie voor de TE-connectiviteit, CPC- plugassemblage vindt u hier.
- Pagina 47 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Extern noodstopkanaal B – bron 16 AWG Externe noodstopkanaal A – retour 16 AWG Externe noodstopkanaal B – retour 16 AWG Droog contactkanaal A –...
-
Pagina 48: Seriële Communicatie
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Seriële communicatie 10.2.3.1 De 37-pins CPC-connector ondersteunt seriële communicatie met de ingebouwde pc door gebruik te maken van een 3-draads RS-232-implementatie. Deze poort biedt toegang tot de RXD-, TXD- en GND- pennen van seriële interface 2 (ttyS2) op de pc. - Pagina 49 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Voeding +24 V gelijkstro Intern circuit SINK +5 V IN_0 Afbeelding 17 Referentieontwerp, DI SINK-modus (1-Vecow Co., Ltd., 2016) Voeding +24 V gelijkstro...
- Pagina 50 Externe noodstop 10.2.3.3 De OTTO 100 V2.5 ZRV maakt gebruik van een tweekanaalsnoodstopsysteem. De interface voor hulpstukken zorgt voor een onderbreking van dit tweekanaalscircuit om de integratie van een op het hulpstuk gemonteerde noodstoptrigger mogelijk te maken. Dit circuit werkt door een signaal van 24 V te presenteren en de retourleidingen te controleren.
-
Pagina 51: Droge Contactcircuits
De interface biedt toegang tot twee “droge” contactcircuits die worden bestuurd door de hoofdveiligheidsrelais van de OTTO 100 V2.5 ZRV. Een “droog” contact is een circuit dat door een relais loopt en niet is voorzien van spanning of “bevochtigd” door een spanningsbron. - Pagina 52 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Zie de volgende referentie van IDEC Corp. (3-IDEC Corp., 2009), met 4 voorbeelden van circuitbeveiligingscircuits. Dit beveiligingscircuit kan worden gebruikt als de belastingsimpedantie kleiner is dan de RC-impedantie in een wissellaststroomcircuit.
- Pagina 53 Als de OTTO 100 V2.5 ZRV normaal werkt, zal het openen van de hulpcontactlus een veiligheidsstop veroorzaken. Als de OTTO 100 V2.5 ZRV in een noodstopstatus staat, is het openen van dit circuit een manier om in een storingssituatie een reset van de noodstop te voorkomen.
- Pagina 54 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Als er een inductieve of zeer capacitieve belasting vereist is, wordt aangeraden een externe accu te installeren als de hoofdvoedingsbron voor de hulpstukken. Met het juiste accuoplaadcircuit kan de stroompoort van het hulpstuk worden gebruikt om een continue doorlopende druppeloplading voor deze tweede accu te bieden.
-
Pagina 55: Perceptiefunctionaliteit
11.1 Gezichtsveld van 3D-perceptie De enkelvoudige 3D-camera aan de voorkant van de OTTO 100 V2.5 ZRV heeft een 90° horizontaal gezichtsveld (field of view, FoV) en een gezichtsveld van 47° boven de vloer. Zie voor meer informatie ICD-000078 - Sensorvoetafdruk van de OTTO 100 V2.5 ZRV. Deze documenten zijn beschikbaar op het OTTO-ondersteuningscentrum op help.ottomotors.com. -
Pagina 56: Opmerkingen
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 11.2 Opmerkingen OTTO Motors blijft het 3D-perceptiehulpstuk testen om de mogelijkheden en het gezichtsvermogen van elke met 3D uitgeruste OTTO-ZRV te vergroten. -
Pagina 57: Testresultaten
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 11.5 Testresultaten Alle tests werden uitgevoerd met obstakels die de OTTO-ZRV van de voorkant benaderen, waarbij het voertuig recht naar het obstakel toe reed. •... - Pagina 58 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Onder- hang met grote textuur Onder- hang met gemiddeld e structuur Onder- hang met Voorwaardelijk kleine geslaagd textuur Afhankelijk van de textuur van het voorwerp, de...
- Pagina 59 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Onderste afbeeldingen Klein voorwerp ver weg, toont een mislukte test Grote Geen afbeelding beschikbaar Geen afbeelding beschikbaar uniforme onder-hang Overhang met grote...
- Pagina 60 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Onderste afbeeldingen Toont detectie van overhangend voorwerp terwijl OTTO-ZRV zich eronder bevindt. Grote uniforme overhang Verhoog-de paal Vorkhef- truck- Voorwaardelijk tanden op...
- Pagina 61 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F afbeeldingen Toont succesvolle detectie van vorkheftruck- tanden op een korte afstand. Middelste afbeeldingen Toont succesvolle detectie van vorkheftrucktande n bij maximale detectieafstand (3,5 m).
- Pagina 62 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Bovenste afbeeldingen Toont succesvolle detectie van vorkheftruck- tanden op een korte afstand. Middelste afbeeldingen Toont succesvolle detectie van vorkheftruck- tanden bij maximale...
-
Pagina 63: Uitpakken
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F UITPAKKEN 12.1 Vereiste tijd Ongeveer 30 minuten. 12.2 Vereiste materialen • nr. 2 Robinson of nr. 2 kruiskopschroevendraaier 12.3 Wat zit er in •... - Pagina 64 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 2. Verwijder het bovenste en voorste kratpaneel. 3. Verwijder de houten vulstukken (2 x houtstukken 40 x 90 cm). Afbeelding 23 Houten vulstukken in krat 4.
-
Pagina 65: Basisgebruik
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F BASISGEBRUIK In deze paragraaf wordt de werking van het OTTO 100 V2.5 zelfrijdende voertuig (ZRV) beschreven. Gevaar Voordat de OTTO 100 V2.5 ZRV wordt gebruikt, moet het omliggende gebied worden goedgekeurd voor autonome navigatie door een vertegenwoordiger van OTTO Motors. -
Pagina 66: Lock-Out/Tag-Out Procedure
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 13.1 Lock-out/tag-out procedure Alleen opgeleid personeel dat door OTTO Motors geautoriseerd is, mag de OTTO 100 ZRV openen. Voordat u onderhoud uitvoert, moet u altijd de lock-out/tag-outprocedure volgen om een OTTO™... - Pagina 67 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Juiste persoonlijke beschermingsmiddelen (PBM) Tijdens het werken met een OTTO 100 zelfrijdend voertuig moeten te allen tijde veiligheidsschoenen of schoenen met stalen neuzen worden gedragen. OTTO 100 V2.4 Lock-out/tag-out 13.1.1 1.
-
Pagina 68: Opstarten
Als dit gebeurt, moet de stroom opnieuw worden uitgeschakeld zodra het opstartproces is voltooid. 3. Wacht tot alle lampjes op de OTTO 100 V2.5 ZRV UIT zijn (ten minste 30 seconden). Dit betekent dat de hoofdcomputer en alle elektronica met succes zijn uitgeschakeld. -
Pagina 69: Opladen
Voor het opladen van de OTTO 100 V2.5 ZRV mogen alleen OTTO-opladers worden gebruikt, om verkeerd gebruik of beschadiging van de accu te voorkomen Als er bij de OTTO 100 V2.5 ZRV een OTTO 100 Fast Charger is inbegrepen, worden voertuigen zelfstandig en zonder menselijke tussenkomst naar het opladen gestuurd. -
Pagina 70: Een Niet-Aangedreven Of Uitgeschakelde Otto 100 V2.5 Verplaatsen
Als dit gebeurt, moet de stroom opnieuw worden uitgeschakeld zodra het opstartproces is voltooid. 3. Wacht tot alle lampjes op de OTTO 100 V2.5 ZRV UIT zijn (ten minste 30 seconden). Dit betekent dat de hoofdcomputer en alle elektronica met succes zijn uitgeschakeld. -
Pagina 71: Verplaatsen En Uitpakken
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 13.6 Verplaatsen en uitpakken De OTTO 100 V2.5 ZRV heeft een robuuste structuur, waardoor deze met de hand of met behulp van hijsmachines zoals een vorkheftruck kan worden opgepakt of geheroriënteerd. Wanneer u de OTTO 100 V2.5 ZRV optilt, moet u deze vanaf de onderkant van het voertuig optillen met behulp van riemen die zich... -
Pagina 72: Opslag
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 13.7 Opslag Voordat u de OTTO 100 V2.5 ZRV gedurende een langere periode (langer dan twee dagen) opslaat, kunt u de accustatus het beste verlagen tot een ladingsstatus van ongeveer 50% (ongeveer 24 V open circuit bij 25 °C). -
Pagina 73: Verbinding Maken Met De Otto 100 V2.5 Zrv
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 13.10 Verbinding maken met de OTTO 100 V 2.5 ZRV OTTO zelfrijdende voertuigen (ZRV) kunnen op individuele basis worden aangesloten met behulp van een computer en netwerkkabel. - Pagina 74 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Linux 13.10.2.1 1. Klik in het systeemvak op het pictogram Network Manager (Netwerkbeheer) en selecteer Edit Connections (Verbindingen bewerken). Het scherm Network Connections (Netwerkverbindingen) wordt weergegeven.
-
Pagina 75: Windows 7
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Windows 7 13.10.2.2 1. Rechtsonder in het scherm klikt u met de rechtermuisknop op het pictogram Network (Netwerk) en vervolgens op Open Network and Sharing Center (Netwerk- en deelcentrum openen). -
Pagina 76: De Otto-Zrv Pingen
2.12.x of lager naar versie 2.14.x of hoger, maar voor latere updates is er geen herconfiguratie van de netwerkinstellingen meer vereist. 1. Sluit uw computer met behulp van een ethernetkabel aan op de OTTO-ZRV. Zie voor meer informatie het gedeelte Verbinding maken met de OTTO 100 V2.5 ZRV. 2. Navigeer vanuit een browser naar 10.255.255.1:8090. - Pagina 77 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Als het configuratiescherm na het wijzigen van de hostnaam langzaam reageert, moet u de OTTO-ZRV opnieuw starten. 4. Klik op Apply (Toepassen). 5.
-
Pagina 78: Onderhoud
Neem contact op met OTTO Motors om de status van de accu te controleren Neem contact op met de klantenondersteuning van OTTO Motors voor het bestellen van een van de onderdeelnummers waarnaar in de volgende onderhoudsprocedures wordt verwezen. Als het onderstaande onderhoud niet kan worden voltooid of het OTTO 100 V2.4 zelfrijdende voertuig verdere reparaties nodig heeft, neemt u contact op met OTTO Motors. -
Pagina 79: Wekelijks Preventief Onderhoud
OTTO™ zelfrijdend voertuig (ZRV) te deactiveren. Waarschuwing Als de OTTO 100 V2.5 ZRV onmiddellijk voorafgaand aan het uitvoeren van onderhoud in bedrijf is geweest, kunnen de motoren en motoraandrijvingen op de tractiecircuitplaat (onderaan de robot) een verhoogde temperatuur hebben, wat bij aanraking een brandwond kan veroorzaken voor de technicus. -
Pagina 80: Benodigde Materialen/Gereedschappen
14.1.2.1 • Zaklamp • Anticondensatie/antistatische lensreinigingsdoekjes (OTTO Motors onderdeelnr. 015591) Let op Gebruik geen schurende voorwerpen of oplosmiddelen op de LiDAR-eenheid, omdat dit de LiDAR beschadigt. Gebruikte en vieze reinigingsdoeken of doekjes zullen na verloop van tijd krassen op het venster veroorzaken. Het LiDAR-venster is een onderdeel dat slijtage ondervindt, maar de juiste zorg en reiniging kunnen de levensduur aanzienlijk verlengen. -
Pagina 81: Inspectie Van De Aardingsriem
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Inspectie van de aardingsriem 14.1.3 De aardingsriem moet terwijl het OTTO 100 V2.4 zelfrijdende voertuig beweegt volledig contact maken met de vloer. -
Pagina 82: Oplaadcontacten Controleren
De 3D-perceptiecamera aan de voorkant van de OTTO 100 V2.4 ZRV wordt beschermd door een glazen lens. 1. Inspecteer het venster visueel en bevestig dat er geen stof of vuil op de kap zit. 2. Reinig de kap zo nodig voorzichtig met een microvezeldoek of een door OTTO Motors goedgekeurde reinigingsdoek. Let op Oefen geen overmatige druk uit op de de glasplaat. -
Pagina 83: Kalibratie Van De Accu
Unit, BMU) die geïntegreerd is in het accupak zelf. Tijdens de gebruiksduur van de OTTO 100 V2.5 ZRV kan de ladingsstatus van de accu (state of charge, SoC) afwijken van wat er wordt berekend door de BMU. Dit gebeurt als de accu meerdere keren binnen een bepaald bereik wordt opgeladen en ontladen en nooit op 0 of 100% SoC komt. -
Pagina 84: Kalibratie
Als de OTTO 100 V2.4 ZRV na het voltooien van deze kalibratieprocedure problemen met accuprestaties blijft ondervinden, neemt u contact op met de klantenondersteuning van OTTO Motors voor verdere richtlijnen. © Clearpath Robotics Inc. 2020. Alle rechten voorbehouden. CLEARPATH en OTTO zijn handelsmerken van Clearpath Robotics Inc. Alle andere product- en bedrijfsnamen zijn handelsmerken of handelsnamen van hun respectieve bedrijven. -
Pagina 85: Maandelijks Preventief Onderhoud
Unit, BMU) die geïntegreerd is in het accupak zelf. Tijdens de gebruiksduur van de OTTO 100 V2.5 ZRV kan de ladingsstatus van de accu (state of charge, SoC) verkeerd worden gemeld, wat gepaard kan gaan met een hoger spanningsverschil tussen de accucellen. -
Pagina 86: Celbalancering
14.2.1.3 1. Instelling van OTTO 100 V2.5 ZRV a. Zorg ervoor dat de accu in de OTTO 100 V2.5 ZRV ontladen is tot ongeveer 10% - 14% zoals weergegeven in de OTTO-app of Fleet Manager. b. Als de OTTO 100 V2.5 ZRV aangesloten is op Fleet Manager, gaat u in Fleet Manager naar Monitor >... - Pagina 87 1. Nadat de OTTO 100 V2.5 ZRV gedurende 30 minuten uitgeschakeld is geweest, is de celbalanceringsprocedure voltooid. 2. Om te controleren of deze correct uitgevoerd is, laat u de ladingsstatus van de OTTO 100 V2.5 ZRV zakken van 100% naar 10%: 3.
-
Pagina 88: Preventief Kwartaalonderhoud
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F 14.3 Preventief kwartaalonderhoud Voer de volgende taken één keer per kwartaal uit: Wiel-/zwenkwielinspectie 14.3.1 Benodigde materialen/gereedschappen 14.3.1.1 • Twee personen •... -
Pagina 89: Preventief Onderhoud Per 36 Maanden
OTTO-ZRV. In nieuwstaat hebben de aandrijfwielen van de OTTO 100 / OTTO 100 V2.5 een rubberdikte van 10 mm. Als dit 8 mm of minder is, moet het wiel worden vervangen. Als beschadiging van het wiel groter is dan 2 mm x 2 mm in grootte, dieper dan 2 mm diep, leidt tot verhoogde plekken op het wiel of zorgt dat het wiel niet soepel rolt (bv. -
Pagina 90: Verwijdering
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F VERWIJDERING Houd u altijd aan de milieuwetgeving die in uw regio geldig is. Als u de OTTO 100 V2.4 / 2.5 SDV demonteert voor verwijdering, geef dan alle commercieel haalbare gedemonteerde componenten door voor recycling. -
Pagina 91: Problemen Oplossen
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F PROBLEMEN OPLOSSEN Bestudeer de volgende tabel voor mogelijke methoden om te herstellen van een onverwachte status van het OTTO zelfrijdende voertuig (ZRV). Raadpleeg indien mogelijk de OTTO Fleet Manager-toepassing en bekijk vanuit Fleet View (Vlootweergave) de Exceptions (Uitzonderingen) voor het specifieke voertuig om uw beoordeling te beginnen. - Pagina 92 Als het geluid van de bovenkant van het voertuig komt, controleert u of de lift/het hulpstuk niet ergens extern of intern vastgeklemd zit. Neem contact op met de klantenondersteuning van OTTO Motors als het probleem niet kan worden opgelost. De OTTO-ZRV beweegt Controleer het omliggende gebied op obstakels die het pad van het niet naar de geïnstrueerde...
-
Pagina 93: Referenties
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F REFERENTIES ECS-8000 User Manual, Vecow Co., Ltd., New Taipei City, Taiwan, 2016 RF1V Force Guided Relays / SF1V Relay Sockets, IDEC Corp., Osaka, Japan, 2009 ©... -
Pagina 94: Verklaringen
OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F VERKLARINGEN 18.1 Conformiteitsverklaring van leverancier Nalevingsinformatie voor 47 CFR § 2.1077 OTTO 100 V2.5 Verantwoordelijke partij Clearpath US One Marina Park Drive, 10th Floor... -
Pagina 95: Eu-Verklaring Van Overeenstemming
Machine naam: Autonomous Mobile Robot (AMR) Model: OTTOTM 100 V2.5 Serienummer(s): B31-xxxx250xx vervaardigd door: Clearpath Robotics Inc. dba OTTO Motors 124 Bleams Road Kitchener, ON – N2C 2K5, Canada Waarop deze verklaring betrekking heeft, in overeenstemming is met de volgende Europese richtlijnen/... - Pagina 96 OTT O 1 0 0 V 2. 5 • O M M - 00 0 08 1 • R EV . F Dit zijn belangrijke veiligheidsinstructies en deze moeten ter referentie worden bewaard. EINDE DOCUMENT © Clearpath Robotics Inc. 2020. Alle rechten voorbehouden. CLEARPATH en OTTO zijn handelsmerken van Clearpath Robotics Inc. Alle andere product- en bedrijfsnamen zijn handelsmerken of handelsnamen van hun respectieve bedrijven.